HUBO-2 Robot Shows Off (Video)
Share
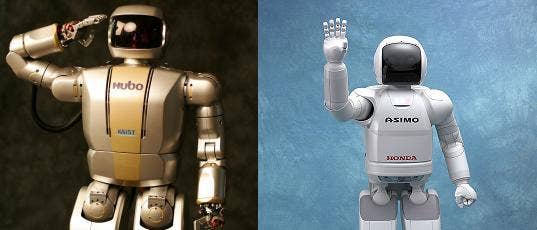
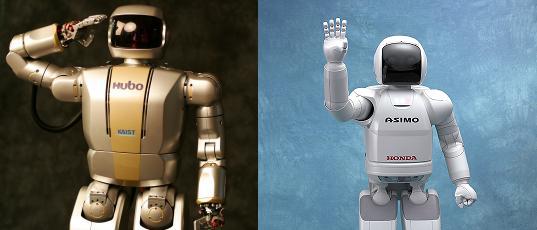
The Beatles and The Monkees. Scooby-Doo and Josie and The Pussycats. Transformers and Gobots. It seems like whenever someone creates something amazing, someone else has to copy it. But what happens when the copy is as good as the original? The humanoid robot or HUBO from Korea Advanced Institute of Science and Technology (KAIST) may seem like a copy of ASIMO. It was made later, has the same astronaut look to its design, and performs many of the same cutesy tasks. It's even the exact same height (130cm). Yet the latest version, HUBO-2, has the range of motion and the mobility to dance, shake hands, and even play with a sword. Is it a copy, or just an example of brilliant robotic engineers thinking alike? Watch the video after the break and judge for yourself.
Humanoid robotics is sort of like general artificial intelligence. There have been some amazing strides in narrow application robotics (such as Adept Quattro), and narrow AI (artificial writers), but the race to create human-like intelligence and bodies is still a long ways off. ASIMO and HUBO are two of the few high profile and well funded private programs actually chasing the dream of robots that can move and interact with people as an equal. Their successes, then, are typically unique in the field. ASIMO has had break-throughs in the level of complex human tasks it can accomplish. HUBO put on Albert Einstein's face and interacted with people with help from Hanson Robotics. With enough time, effort, and money, it seems like that one of these two projects will eventually create a robot that can fully mimic human actions and find a role in human society. Companion bots may seem like just another science fiction fantasy, but these humanoid robotics programs are taking steps in that direction.
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

HUBO-2's precise finger movements are pretty amazing. There's a dexterity there that could make it a tough competitor to other robotic hands we've discussed. The smooth motion during the tai-chi segment is impressive for a research robot, but we've seen similar capabilities in industrial machines. It's disappointing that the running segment was done without a complete upper body. However, I do give props to a robot that can swing a sword (1:51) even if it is made of foam.
KAIST's robotic program is fairly young. Their KHR line of walking robots was launched in 2003 as little more than a pair of walking legs. HUBO-2, which is also known as KHR-4, shows how quickly the the line has advanced. It has 40 degrees of freedom (6 more than ASIMO), weighs just 45 kg (less than ASIMO) and can ran at speeds up to 3.3 km/h. ASIMO wins the last race hands down by running at 6+ km/h. It's harder to compare their sensor and decision making capabilities. HUBO-2 has some remarkable voice and object recognition, with independent eye tracking. However, it hasn't had a chance to test itself on a moving obstacle course the same way that ASIMO has.
Even if KAIST is actively copying Honda's work with ASIMO (and I don't think they are), that wouldn't necessarily be a bad thing. ASIMO is a remarkable robot, we should be copying it, and trying to improve upon its design. Undoubtedly HUBO has many unique innovations that already differentiate it from other robots, but again, the uniqueness of the design isn't the most important criteria. Success is. And I think that the more that robotics companies can borrow from, and compete with one another, the better the robots they build will be. Companies like Willow Garage advocate this explicitly by running open source robotics programs. Larger investors, like Honda, may not see the financial incentive in such open cooperation, but if it leads to the first truly human like robot, wouldn't it be worth it? Sharing ideas and technology is a small price to pay to help create a Transformer. Or even a Gobot.
[photo credits: KAIST, Honda]
[video credit: PlasticPals]
Related Articles

AI Can Now Design and Run Thousands of Experiments Without Human Hands. We Aren’t Ready for the Risk to Biosecurity.

New Algae Robots Swarm Like Locusts at the Flick of a Switch

Robots With Different Designs Can Now Share Skills
AI Can Now Design and Run Thousands of Experiments Without Human Hands. We Aren’t Ready for the Risk to Biosecurity.
New Algae Robots Swarm Like Locusts at the Flick of a Switch
Robots With Different Designs Can Now Share Skills
What we’re reading