ASIMO robot impresses by navigating changing terrain
Share
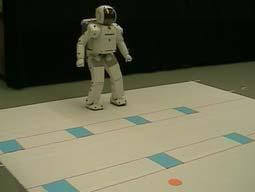
Scientists are helping robots think before they step. Honda's versatile ASIMO robot was able to find its way through moving obstacles and simulated terrain at Carnegie Mellon University. It makes you wonder if the researchers spent a lot of hours in video arcades during the 80s. If so, it was time well spent because ASIMO performed like a dream, navigating around cut out shapes that represented real-world barriers. Able to dodge spinning blades, Frogger-like moving lines, and dynamic environments, ASIMO showed us again why its one of the top humanoid bots out there. Watch our robot friend outperform the frog in a Discovery Channel video after the break.
Wait...now go!..No! Wait...wait...go, go, go!
ASIMO's success may prove to be a launching point for walking robots. Bipedal bots are some of the most challenging designs in the robotics world. Not only do you have to worry about balance and locomotion, they have to find a safe place to put their feet. Which is why ASIMO's performance was so exemplary. Carnegie Mellon's new foot-stepping software allows the bot to plan out complex and dynamic paths in its environment. It is constantly asking itself, what's the best way to get where I'm going?
Of course, ASIMO wasn't alone. Carnegie Mellon's Robotics Institute developed a generalized foot stepping program for all legged robots, not just Honda's. The Linux based H7, the HRP-2 series (remember the sexy 4C that we covered early?), and even the "little dog" (we featured the "big dog" in our war robots story) had a chance to find their way through difficult terrain and elevations. Each robot had its own course, and its own videos, but only ASIMO seemed poised to step out in the real world.
It's only a hop, skip, and a jump from point A to B
As you can see in the video, the man behind the robot is Professor James Kuffner. His approach to planning and testing the foot stepping program is simple and elegant. It all comes down to weighted costs. Think about when you want to cross difficult terrain. You first look at obstacles and determine which of them would be harder to cross than others. Such cost-analysis helps you find the easiest path to take. That sort of decision making is what Kuffner is helping robots to do as well.
Kuffner allows the bots to rate the terrain based on different factors: angles, safety, roughness, stability, and bumpiness. Combine all those factors together and the robot can choose which objects to avoid, and which to head towards. When I watched the video, I was impressed that ASIMO could dynamically evaluate the obstacles quickly enough to dodge two blades spinning at different rates. That's really a great accomplishment. Of course, it would be a lot more impressive if the "obstacles" weren't actually paper cut outs.
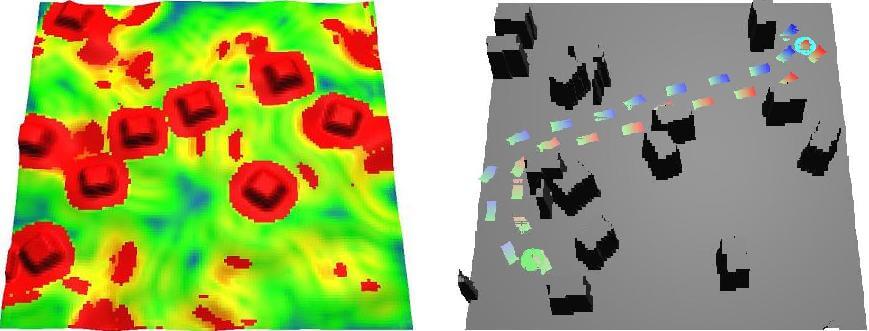
Difficult terrain appears red, easier terrain appears blue or green. A robot can then plot its steps along the easiest path.
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

It would also be more impressive if ASIMO couldn't rely on the overheard camera. That eye in the sky provides 2D information that walking robots probably wouldn't have access to in the real world. At this first level test, Carnegie Mellon has excelled, but getting robots to use their 3D vision to create a 2D map of their area and navigate it...that would be a wonderful next step. Some of the 3D stereo image recognition work has already been done with a navigation robot in Germany.
Pardon me sir, but your robot is on my foot...
The really promising thing about Kuffner's weighted costs approach to footstep planning is that robots can be programmed to assign a cost to almost anything. People are probably the most important. As readers have pointed out, Sushi Chef robots, flexpickers, and baseball robots are all a little scary when you think about how much power and speed they possess. By assigning an infinite cost to human-robot collisions, you could insure that robots do everything in their power to avoid running into people. In a crowded office building, on a street, or even in your home, bipedal robots will need this type of software to help them navigate around rapidly shifting humans in their environment.
But the benefits of cost-analysis don't stop there. You could get bipedal robots to value moving walkways (those conveyor belts at the airports), escalators, or other helpful terrain that humans use all the time. By adding in hand movements, you might see robots that can climb ladders or the sides of buildings. Such search and rescue robots are just one option. In fact, Carnegie Mellon's research is really opening up the possibilities for bipedal robots. I mean, the whole reason they're designed with legs in the first place is so that they can take advantage of human-like versatility of movement. Kuffner's group is helping walking robots access this potential.
I'm not sure I agree , however, with Kuffner's opinion that robots will be seen in the home as soon as the price tag drops down below $50,000. As cool and versatile as humanoid robots may be, they aren't the only option out there. The Roomba, after all, is the top selling house-hold robot and its far from humanoid. With advances in automobile navigation, the standard robot in the house may be a car.
But at some point, humanoid robots will likely become much more present in our daily lives. Maybe as workers, maybe just as novelty. Either way, the navigational abilities that Carnegie Mellon has developed will be invaluable. I'm anxious to see what Kuffner and the robotics institute has in store for ASIMO and his robot friends next. Hopefully they'll move away from the 2D world of Frogger and jump into using on board cameras. Either way, I'm confident that these scientists will help robots put their best foot forward.
Related Articles

In a First, a Humanoid Robot Performed Live Surgery Under a Surgeon’s Control

Companies Could Soon Staff ‘Stubbornly Local’ Jobs With Workers 4,000 Miles Away

Japan Thinks Swarms of Transformer Robots Could Explore the Moon
In a First, a Humanoid Robot Performed Live Surgery Under a Surgeon’s Control
Companies Could Soon Staff ‘Stubbornly Local’ Jobs With Workers 4,000 Miles Away
Japan Thinks Swarms of Transformer Robots Could Explore the Moon
What we’re reading