If There’s Life on Europa, Robots Like These Will Find It

Share
The exploration of Europa begins under the ice in Antarctica.
That’s where a team of researchers, led by the Georgia Institute of Technology (Georgia Tech), has been testing a variety of robotic subs in recent years to learn about what technologies will work best when NASA eventually launches a mission to Jupiter’s icy moon.
“I really want us to go down through the ice on Europa. I want to explore what’s down there,” says Britney Schmidt, assistant professor at the School of Earth and Atmospheric Sciences at Georgia Tech and principal investigator for the NASA-funded project called SIMPLE, for Sub-ice Investigation of Marine and Planetary-analog Ecosystems.
Astrobiologists like Schmidt are intrigued by Jupiter’s ice-covered moon thanks to evidence that below the surface there may be an ocean of water — perhaps twice as much water as Earth — where life could be found. Liquid pockets of water may also exist near the surface within Europa’s miles-thick ice shell, offering a potential target of where to land a submarine shot through 500 million miles of space from Earth.
On Monday, NASA scientists, Schmidt among them, announced further evidence that liquid water may be present close to the surface. The findings are based on observations from the Hubble Space Telescope, showing what researchers believe to be plumes of water vapor erupting from the moon’s southern hemisphere. The data, collected in 2014, supports a different set of observations made by the space-based telescope in 2012.
A robotic mission across the solar system to investigate these phenomena up close is years, if not decades, away from reality. NASA does plan to launch a spacecraft to Jupiter in the early 2020s that will make dozens of fly-by missions of Europa while in orbit to collect data about the planet’s fourth largest moon.

Vickie Siegel (far right), Bill Stone and the rest of the SIMPLE team maneuver the underwater autonomous vehicle ARTEMIS during one of its launches. The Sub-ice Investigation of Marine and Planetary-analog Ecosystems (SIMPLE) project is funded by NASA, and is the basis for the technology that will one day be used to investigate the icy ocean on Jupiter's moon Europa. The lead scientist is Britney Schmidt from the Georgia Institute of Technology. Image credit: Mike Lucibella/ASC/National Science Foundation.
{kind=link}
In the meantime, Schmidt prepares for the day NASA lands on Europa by developing robots and related technologies in a place that best mimics the conditions on Europa: the ice and ocean of Antarctica.
The latest effort found Schmidt and her team putting the behemoth robot sub named ARTEMIS (Autonomous Rovers/airborne-radar Transects of the Environment beneath the McMurdo Ice Shelf) through its paces. Tipping the scales at 1,300 kilograms, nearly 3,000 pounds, ARTEMIS is certainly the largest of the handful of robotic subs that have been sent underneath Antarctic ice over the last decade or so. ARTEMIS was built by Stone Aerospace out of Austin, Texas.
Sporting a sleek, orange body with two large rear thrusters, ARTEMIS bristles with tools and tech, from up- and forward-looking multibeam sonars to downward-looking echosounders to high-definition video and high-resolution cameras. Among its scientific sensors is a specially-designed protein fluorescence spectrometer that can detect biomarkers that suggest biological process — in other words, life.
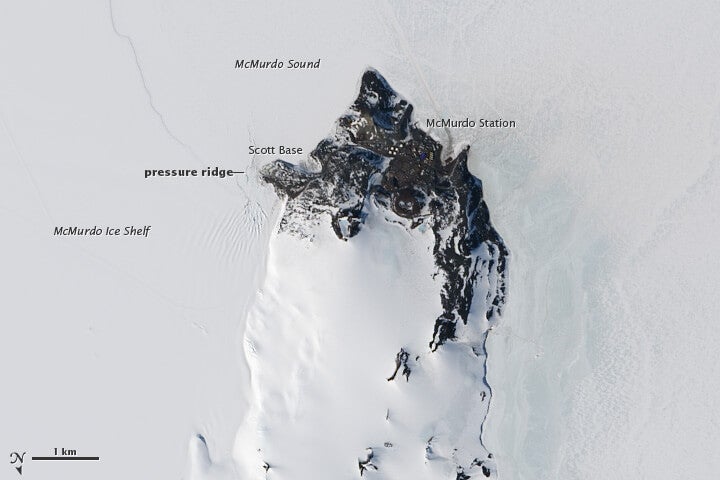
The team had hoped to send ARTEMIS as far as 20 kilometers, about 12 miles, under the McMurdo Ice Shelf, a small but distinct part of the Texas-sized Ross Ice Shelf. The robot only managed to swim about a kilometer (about a half-mile) under the ice shelf but made one five-kilometer (three-mile) foray underneath the thinner sea ice that abuts the ice shelf. There were some problems with sensors that are being re-evaluated. Its sheer size made it logistically intensive, Schmidt notes.
“Any time we do one of these projects … really what we’re doing is that we’re putting time into these technologies to do things in the future,” Schmidt says. “You learn what not to do, you learn what to do.”

Vickie Siegel looks up from the hole drilled in the sea ice as the underwater autonomous vehicle ARTEMIS is lowered into the water below. The Sub-ice Investigation of Marine and Planetary-analog Ecosystems (SIMPLE) project is funded by NASA, and is the basis for the technology that will one day be used to investigate the icy ocean on Jupiter's moon Europa. The project's lead scientist is Britney Schmidt from the Georgia Institute of Technology. Image Credit: Mike Lucibella/ASC/National Science Foundation.
{kind=link}
ARTEMIS did prove to be particularly adept at navigation, able to calculate direction, distance and velocity using onboard instruments – an inertial mass unit and Doppler velocity log – and return home autonomously within a few feet from the hole in the ice where it was dropped into the water.
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

“It was tremendous,” Schmidt says. “Its return behaviors were really, really great.”
Schmidt and members of her team will return to Antarctica next year to test another robotic sub developed by engineers and students from Georgia Tech. Shaped more like a torpedo, Icefin made its first dives under the Antarctic ice during the 2014-15 austral summer, which runs from October to February, as part of the SIMPLE project. It worked in tandem with yet another robot, a remotely operated vehicle called SCINI (Submersible Capable of under-Ice Navigation and Imaging) that was originally developed under a grant from the National Science Foundation to Stacy Kim, a benthic ecologist at Moss Landing Marine Laboratories.
Like ARTEMIS, Icefin is tethered to the surface by a fiber optic cable, and it can be operated manually or autonomously. Much of the robot is being reconfigured, with engineers swapping out computers and relocating sensors and other scientific instruments.
“In the long run, we’re trying to develop an arm, so that it can actually manipulate the ice and silicate seafloor. That’s another work in progress,” Schmidt said, adding that student engineers at Georgia Tech are designing that part of the project.

Britney Schmidt, the lead scientist for the project SIMPLE, readies a CTD, which measures the conductivity, temperature, and depth of the seawater. This is to corroborate readings from the underwater autonomous vehicle ARTEMIS. The Sub-ice Investigation of Marine and Planetary-analog Ecosystems (SIMPLE) project is funded by NASA, and is the basis for the technology that will one day be used to investigate the icy ocean on Jupiter's moon Europa. The project's lead scientist is Britney Schmidt from the Georgia Institute of Technology. Image Credit: Mike Lucibella/ASC/National Science Foundation.
{kind=link}
The goal in 2017 will be to take Icefin far across the Ross Ice Shelf and drop it through about 400 meters, or a quarter mile, of ice into the water below. The following year, the team will hope to go even deeper, through about 800 meters (a half-mile) of ice. Schmidt will collaborate with scientists from New Zealand who are planning to drill through the ice with a hot-water drill to install oceanographic instruments below the ice shelf.
Funding for Schmidt’s project is again from NASA through its ASTEP (Astrobiology Science and Technology for Exploring Planets) program, with additional logistical support from the National Science Foundation, which manages the U.S. Antarctic Program.
Going that deep through an ice shelf is not just about testing robots under extreme conditions. Researchers hope Icefin can provide valuable oceanographic data, particularly in how the ice affects conditions in the water and vice versa.
“It’s helping us understand how ice-ocean systems work in general. If we don’t understand it here very well, we’re certainly not going to understand it on a planet that’s [500 million miles] away,” she said. “The more we can learn about the Earth and how its ice-ocean system works, the better off we’re going to be when we get to Europa.
“I want us to be driving submarines around on Europa,” she adds, “that’s why I work on this stuff on the Earth.”
Image source:NASA/JPL/SETI Institute (banner image of Europa), Mike Lucibella/ASC/National Science Foundation (images of ARTEMIS team), NASA (image of McMurdo Ice Shelf)
Formerly the world’s only full-time journalist covering research in Antarctica, Peter became a freelance writer and digital nomad in 2015. Peter’s focus for the last decade has been on science journalism, but his interests and expertise include travel, outdoors, cycling, and Epicureanism (food and beer). Follow him at @poliepete.
Related Articles

New Algae Robots Swarm Like Locusts at the Flick of a Switch

These Seven AI Rings Translate Sign Language in Real Time

Robots With Different Designs Can Now Share Skills
New Algae Robots Swarm Like Locusts at the Flick of a Switch
These Seven AI Rings Translate Sign Language in Real Time
Robots With Different Designs Can Now Share Skills
What we’re reading