Robot Uses Air Powered Muscles To Run Like A Human (video)

Share
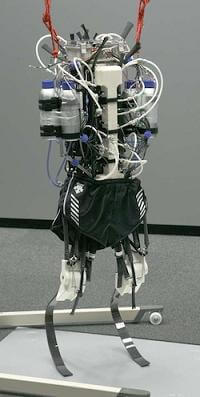
When you go for a jog do you precisely measure the angle of each of your joints to keep you from falling over? No, of course not, only robots do that ...and if Ryuma Niiyama has his way, they won't be doing it for much longer either. The former University of Tokyo post-doctoral student created "Athlete" a bipedal robot that runs on legs powered by pneumatic "muscles". Instead of rotating its joints electrically like most robots, Athlete contracts its muscles in the same pattern and with the same timing as you do. To simplify the task, the lower legs were replaced by the sort of prosthetic running blades used in the Para-Olympics. Niiyama presented Athletes' progress at the recent IEEE Humanoids 2010 conference in Tennessee. You can watch its attempts at running in the video below. Athlete only makes it about five or six steps before falling over, but it looks amazingly life-like while doing so.
Like the human body, Athlete's mechanical frame is a complex work of art. In each leg of the robot there are seven sets of artificial muscles. Each set contains one to six pneumatic actuators that actually look like a sort of over-sized muscle fiber. The location and power of these actuators correspond, roughly, to the muscles in the human body including the gluteus, quadriceps, etc. There are pressure sensors in each bladed foot and an inertial sensor system in the torso. The goal of Athlete is to have it learn how to flex these artificial pneumatic muscles in order to run like a human and stay balanced while doing so. As you can see below, Athlete is still in the very early stages of that education. The actual running test isn't until the end (1:25), but check out the rest for some neat background information about the robot.
While at the University of Tokyo, Niiyama was advised by Professor Kuniyoshi and worked with Satoshi Nishikawa to get Athlete running. According to their presentation at the IEEE Humanoid 2010 conference, they were inspired by Oscar Pistorious - the world renowned athlete who runs on bladed prosthetics. Pistorious shows that bipedal running on blades is not only possible, but also highly efficient. With repeated trials, it's possible that Athlete will be able to manage the muscle coordination needed to keep itself upright while running. Niiyama's previous work, a robot named Mowgli, was able to learn to jump in just 150 trials. You can see it leap more than 50% of its body height in the video below. While Athlete is prone to falling now, it could prove as quick a learner as Mowgli.
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

I'm sure some of you are curious as to why I'm spending time discussing a robot that can't get more than 15 feet without falling on its ass. Well, Athlete may not be up to performance standards yet, but it does represent an important concept in robotics. Many of the top bipedal walkers out there (like Asimo, or HRP-4) monitor their joint positions very carefully to keep from toppling over. They know exactly how much each leg should be bent at each portion in their gait. Even small errors in positioning can lead to catastrophic failure. Now, a lot can be done with this technique, including modifying it slightly to allow the foot to fall during portions of the stride, but it's not how humans control their walking. Similarly, we've seen robots that can move pretty fast on two legs and have some great dynamic power and control. We say that these robots are 'running' but they don't quite get both of their feet completely off the ground the way most humans do when sprinting. Athlete actually runs, and it runs like a human - with little regard for exact positioning of its joints. If Athlete can manage to learn how to react quickly and balance itself dynamically, it has the potential to run as smoothly as any human. In the long run it's not clear how much we'll want that kind of movement from a robot. Stiff-jointed walking, if performed fast enough, may be better for many applications. Yet the development of robots like Athlete provide an important alternative that I'm glad is available.
Niiyama has moved on from the University of Tokyo, and is now part of the Robot Locomotion Group at MIT CSAIL. Considering the interesting work coming out of that group, including some cool terrain conquering with Little Dog, I'm sure we'll see much more from Niiyama in the future. We're bound to see more of Athlete as well. According to IEEE Spectrum, its developers are working to refine its balance and movements, and hope to eventually have it tested on a running track. Maybe they can get Pistorious to come and show Athlete how it's really done.
[image credits: Ryuma Niiyama via IEEE Spectrum]
[video credits: Ryuma Niiyama]
[sources: Niiyama, Nishikawa, and Kuniyoshi IEEE Humanoid 2010 Conference (PDF); IEEE Spectrum, Ryuma Niiyama personal website]
Related Articles

New Algae Robots Swarm Like Locusts at the Flick of a Switch

Robots With Different Designs Can Now Share Skills

Sony’s Table-Tennis Robot Beat Elite Human Players With Unorthodox Moves
New Algae Robots Swarm Like Locusts at the Flick of a Switch
Robots With Different Designs Can Now Share Skills
Sony’s Table-Tennis Robot Beat Elite Human Players With Unorthodox Moves
What we’re reading