DLR Robot Hand is Tough Enough to Withstand a Hammer (video)

Share

Most experimental robot hands are delicate fragile instruments of advanced research. In other words, they're wimps. Not so for the latest fist coming from the German Aerospace Center (DLR). Their Institute of Robotics and Mechatronics has built a robotic hand capable of withstanding brushing blows from a hammer. It even survived a strike from a baseball bat. The secret is the hand's ability to adjust stiffness. Loose hands make for delicate work, tight hands don't get damaged by flopping around. Switching between stiff and loose helps the DLR hand stand up to abuse and still be precise. You can see the fully articulated five finger device stand up to a hammer in the video below. Don't miss the very end where it gets struck a crushing blow from a metal rod. Good job DLR, that's a very manly robot hand you've built there.
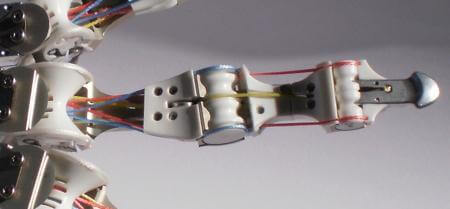
The DLR hand is built to be rugged, but it's also supposed to be as dextrous as other prototypes. It has 19 degrees of freedom (humans have 20) and moves via 38 synthetic tendons (2 for each 'muscle' group). Those tendons are made of a durable synthetic fiber called Dyneema. When a pair of tendons work in tandem, a finger moves. When they oppose each other, the finger grows stiff. It's not that unlike the system in our own bodies.
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

DLR has put its new hand through some impressive tests. There was a 66 G impact from a baseball bat (not shown in the video unfortunately) and plenty of games of catch over several meters (such repeated stressing could damage many robot hands). The device can move fairly quickly - 500 to 2000 degrees of angle per second, depending on the tightness of the actuating springs attached to the Dyneema tendons. Stiffened-enabled speed lets the hand actually snap its fingers (wow!). Its also been able to exert 30 N (~ 7 lbs) of force at its fingertips. That's certainly not bad.
Of course, with so many robotic research projects, the DLR hand is still in very early stages. There's still a lot of work to be done in order to create an applicable device. The hardware also costs a lot: 70,000 to 100,000 Euros (~$96k to $137k).
Still, DLR has a good track record of producing some very cool bots. We've seen their half humanoid Justin, along with some bipedal legs. This latest robot hand is going to become part of the DLR Hand-Arm-System which is hoped to be both durable and very energy efficient. Who knows, maybe in a few years DLR will be able to combine all these disparate ventures into a single, awesome, humanoid robot. If they do, be prepared: you're going to have to bring a lot more than a sledge hammer to slow these things down.
[image credits: DLR via IEEE Spectrum]
[video credit: IEEE Spectrum]
[sources: DLR, IEEE Spectrum]
Related Articles

In a First, a Humanoid Robot Performed Live Surgery Under a Surgeon’s Control

Companies Could Soon Staff ‘Stubbornly Local’ Jobs With Workers 4,000 Miles Away

Japan Thinks Swarms of Transformer Robots Could Explore the Moon
In a First, a Humanoid Robot Performed Live Surgery Under a Surgeon’s Control
Companies Could Soon Staff ‘Stubbornly Local’ Jobs With Workers 4,000 Miles Away
Japan Thinks Swarms of Transformer Robots Could Explore the Moon
What we’re reading