Your Body is the Controller for this Humanoid Robot (video)
Share

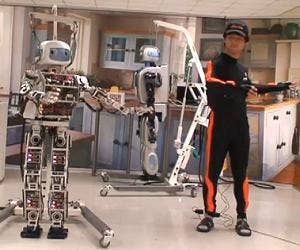
One of the great benefits of building a humanoid robot is that it can move just like a human does. That's never clearer than when the robot actually takes its commands by mimicking your every motion. Donning an orange and black body sock embedded with sensors, researchers at the Korea Institute of Science and Technology control their Mahru robot simply by moving their own body. It's like looking into a bizarre mirror. Lift an arm, and Mahru lifts an arm. Take a step and Mahru takes a step. Squeeze your hands together and Mahru crushes the heads of your opponents...no, actually it doesn't (sorry revengeful nerds). KIST was smart enough to include pressure sensors into the robot's hands and arms so that it can hold delicate objects without damaging them. We've got half a dozen videos for you that showcase the range of Mahru's body-mirroring control system successes - from dancing to shaking hands to holding a balloon. Check them out below. When it comes to operating a robot, KIST has the right idea: programming code isn't nearly as quick (or fun) as simply telling the bot to watch and learn.
The Mahru project at the Cognitive Robotics Center at KIST is headed by Bum-Jae Yun. In the following video, Yun explains Mahru's body-mirroring technology while a student operates the bot. One of the most important concerns in integrating robots into human environments is keeping people safe. Yun demonstrates (towards the end of the clip) that Mahru has great compliance control. You can shake its hand, or push on its body, and the robot will give way. This keeps the robot from hurting you even if the guy operating Mahru turns out to be a psychopath.
Here's the same sort of basic demonstration with Mahru, sans its protective covering. You can see all the internal actuators and computers used to make the robot move. Pay special attention around 1:15 and 2:30 to see how Mahru keeps its balance and its compliance while being bullied by a second researcher that pushes and pulls on its arm while the robot is being teleoperated.
As I mentioned above, Mahru is smart enough to know not to crush things it's holding, even if its human operator moves its hands too close together. Here's a brief clip of its anti-crushing expertise:
Combine the compliance control with the understanding of how to hold objects and you get a robot that can keep its grip on an object even if you mess with it. Though the following clip is relatively short, you are seeing a really important demonstration here. A robot in a human environment must be able to perform its tasks with simultaneously keeping humans safe from collisions. This is much more awesome than it looks:
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

KIST has experimented with different methods of using human body input to control Mahru. The following two clips demonstrate how more traditional motion-capture with cameras (and a different spandex outfit) can allow the robot to repeat recorded movements.
Mahru was developed as the 'first network based' humanoid robot. Unlike Asimo, or the HRP series, Mahru doesn't house the computer that makes its decisions. It uses its sensors (including stereo cameras in the head) to collect data it sends to a central server. That server then tells the robots how to act. KIST's intuitive method of teleoperating the robot is essentially replacing that network (temporarily) with a human brain.
Whenever you see a human controlling a robot with his or her body you may start to daydream about a new economy filled with 'robot drivers' who operate these machines from afar. Like operating a bulldozer but a billion times cooler. Unfortunately, I don't think that's the direction this technology is going to lead us. KIST has ultimately designed Mahru to operate autonomously using its central server as its artificial intelligence. The body-mirroring technology may allow KIST to train Mahru quickly, teaching it how to perform complex tasks by simply watching (or sensing) a human perform them. In my opinion, this is just a programming tool. Why teleoperate a fleet of robots when you can train one, export that training to a million other bots, and get them all to work without human drivers?
We've seen other groups, like Tsukuba University and Dr. Robot, pursuing human-mimicry as a robot operation tool. Reportedly Rodney Brooks' new company, Heartland Robotics, is going to try and revolutionize small scale manufacturing with a robot that is trained in this way. Outside of manufacturing, in fields like space exploration and medicine, robots may be teleoperated by humans every time they are used (at least in the near term). For industrial purposes, however, I think teleoperation is simply going to be a great training tool that won't be used outside the R&D lab. When you see all these cool videos of engineers operating Mahru like a puppet, think of a parent teaching its child how to dance. Sometimes its easier to just show someone how it's done. In the end, however, you've got to let the little guys go and perform on their own. Hopefully KIST's great compliance control will keep us all safe as these bots start to waltz around in the human world.
[screen capture credit: IEEE Spectrum]
[video credits: IEEE Spectrum, Sung Yul Shin]
[source: Cognitive Robotics Center at KIST, Mahru]
Related Articles

Sony’s Table-Tennis Robot Beat Elite Human Players With Unorthodox Moves

A Humanoid Robot Beat the Human World Record for a Half Marathon

Thousands of Everyday Drone Pilots Are Making a Google Street View From Above
Sony’s Table-Tennis Robot Beat Elite Human Players With Unorthodox Moves
A Humanoid Robot Beat the Human World Record for a Half Marathon
Thousands of Everyday Drone Pilots Are Making a Google Street View From Above
What we’re reading