This Robot Can Learn To Run Anywhere, Just Try and Stop It!

Share
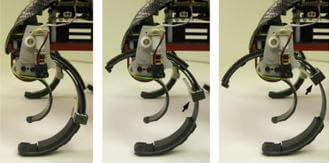
From infancy, humans slowly figure out how to adjust the tension in their legs to maintain their balance and speed while walking. Now a six legged robot is learning the same skills. EduBot at the Kod*Lab at UPenn, is a hexapod with springy carbon fiber appendages much like those used by human amputees when racing at the Paralympics. By adjusting a slider on its legs, EduBot can vary the stiffness of each, and it then walks to discover the optimal gait for the newly configured spring in its step. Stiffer legs allow for better speeds on regular surfaces, while looser legs help on uneven or rough patches. Check out the success and failures of EduBot's tunable limbs in the video below. Learning to walk is still one of the most difficult physical tasks in robotics, but EduBot's efforts are a strong sign that we're slowly progressing towards solving the problem. Or at least learning new ways to approach it.
As you'll see in the following video, EduBot runs sort of like a Looney Tunes character trying to make a quick getaway. Wacky flailing aside, however, there's little doubt that the bot can hustle.
According to their ICRA 2011 paper, "Experimental Investigations into the Role of Passive Variable Compliant Legs for Dynamic Robotic Locomotion", EduBot learned how to optimize its gait by tracking its own speed, efficiency, and stability. It was able to compensate for various levels of stiffness after about 70 trials on average. Those with toddlers will have to tell me how that compares to humans, but for learning a complex tasks like walking that's not bad for a robot.
Figuring out the right combination of speed and tension for different terrain is a neat feat, but it's not the only one this robot has mastered. EduBot is a specialized version of RHex, a hexapod that can conquer sandy inclines and keeps on trucking even after it loses a leg! Watch RHex's robust running in the following clips:
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

As engineers continue to explore robotic walking, we're bound to see many different competing approaches with many different numbers of legs, kinds of mechanical power, and gaits. Just as EduBot gives a clue as to how robots my master tension control in their limbs, competing teams will determine how to optimize dynamic balance and explore other key ingredients in running. I've no doubt we'll see some interesting overlap between powered prosthetic limbs and these bots as well. Collectively we're moving towards a plurality of solutions to the walking problem, which is pretty awesome on its own. It gets even better, however, when you consider how the learning algorithms like those used by EduBot may help us optimize physical movements well outside the realm of their first applications. 70 tries to optimize a complex dynamic task? I'd take that learning curve any day of the week.
*As a bonus for those who can't get enough of the RHex and its family of bots, here's a rocking little overview to play you out:
[screen capture credit: Kod*Lab via IEEE Spectrum]
[video credits: Kod*Lab via IEEE Spectrum, Kod*Lab]
[source: Kod*Lad, IEEE Spectrum]
Related Articles

New Algae Robots Swarm Like Locusts at the Flick of a Switch

Robots With Different Designs Can Now Share Skills

Sony’s Table-Tennis Robot Beat Elite Human Players With Unorthodox Moves
New Algae Robots Swarm Like Locusts at the Flick of a Switch
Robots With Different Designs Can Now Share Skills
Sony’s Table-Tennis Robot Beat Elite Human Players With Unorthodox Moves
What we’re reading