This Exoskeleton Uses AI to Help People Walk Faster With Less Energy
Share
Exoskeletons have been largely confined to the realm of fiction, appearing in sci-fi or superhero movies to make characters stronger, taller, or more destructive (in James Cameron’s Avatar, the somewhat terrifying AMP suit serves as an “amplifier of a human operator,” but is really more like a humanoid war machine with a real human inside). In terms of real-world uses, exoskeletons have been tested or developed in industries like car manufacturing, air travel, the military, and healthcare; these are mostly to help people lift heavy objects and materials.
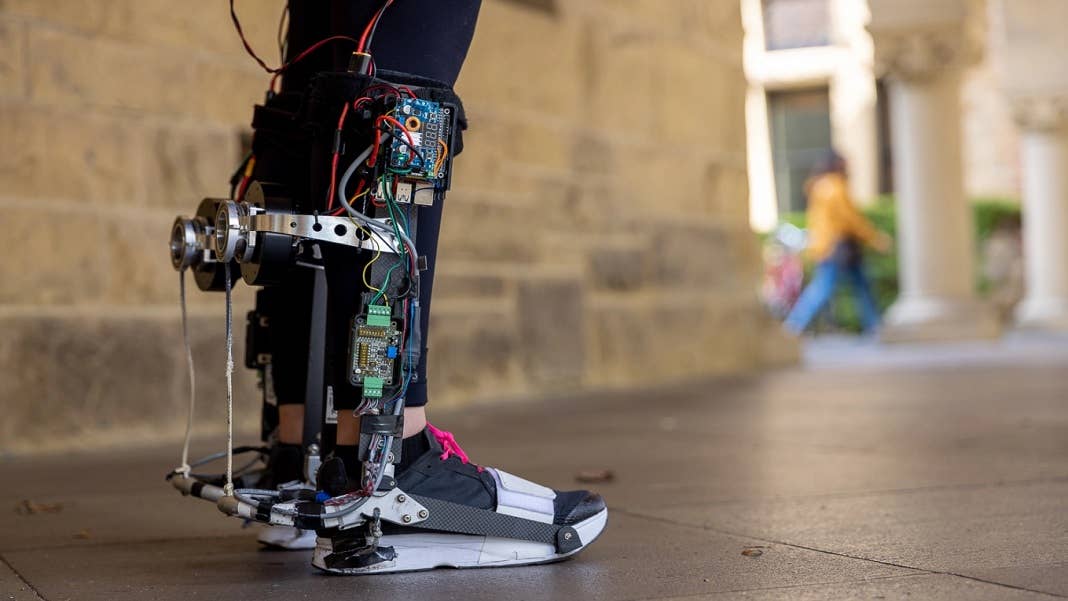
A new exoskeleton serves a different purpose: helping people walk. Developed by engineers at the Stanford Biomechatronics Laboratory, the device is described in a paper published this week in Nature. In a nutshell, it’s a motorized boot that gives wearers a push forward with each step they take. What sets it apart, though, is that its function is tailored to each person who uses it rather than being standard across different heights, weights, and walking speeds.
“This exoskeleton personalizes assistance as people walk normally through the real world,” said Steve Collins, associate professor of mechanical engineering who leads the Stanford Biomechatronics Laboratory, in a press release. “And it resulted in exceptional improvements in walking speed and energy economy.”
The personalization is enabled by a machine learning algorithm, which the team trained using emulators—that is, machines that collected data on motion and energy expenditure from volunteers who were hooked up to them. The volunteers walked at varying speeds under imagined scenarios, like trying to catch a bus or taking a stroll through a park.
The algorithm drew connections between these scenarios and peoples’ energy expenditure, applying the connections to learn in real time how to help wearers walk in a way that’s actually useful to them. When a new person puts on the boot, the algorithm tests a different pattern of assistance each time they walk, measuring how their movements change in response. There’s a short learning curve, but on average the algorithm was able to effectively tailor itself to new users in just an hour.
The exoskeleton works by applying torque at the ankle, replacing some of the function of the wearer’s calf muscle. As users take a step, just before their toes are about to leave the ground the device helps them push off. It worked pretty well; on average, people walked 9 percent faster than usual while expending 17 percent less energy. In direct comparisons on a treadmill, the exoskeleton provided about twice the reduction in effort of similar devices.
Be Part of the Future
Sign up to receive top stories about groundbreaking technologies and visionary thinkers from SingularityHub.

Reducing the effort it takes to walk isn’t generally a goal most of us should be aiming for; if anything, Americans need the opposite. But the team that developed the exoskeleton see it being used to help people with mobility impairments, including the elderly or disabled.
“I believe that over the next decade we’ll see these ideas of personalizing assistance and effective portable exoskeletons help many people overcome mobility challenges or maintain their ability to live active, independent, and meaningful lives,” study author and bioengineering researcher Patrick Slade said in the press release.
Given that the exoskeleton is currently in the prototype stage, it won’t be reaching a wider user base very soon. In addition, it’s only been tested on healthy adults in their mid-20s thus far, so new tests would need to be done and adjustments made for people who actually need help walking.
The team is also planning to design iterations that help improve wearers’ balance and even reduce joint pain. They’re optimistic about their device’s potential. “I really think this technology is going to help a lot of people,” said Collins.
Image Credit: Stanford University/Kurt Hickman
Related Articles

‘Hello There the Jacobian Conjecture Is False Thanx’: Why a Tiny Social Media Post Has Mathematicians Rethinking AI

Why Scientists Redesigned the Botox Enzyme With AI

OpenAI Agent Breaks Free and Hacks Hugging Face
‘Hello There the Jacobian Conjecture Is False Thanx’: Why a Tiny Social Media Post Has Mathematicians Rethinking AI
Why Scientists Redesigned the Botox Enzyme With AI
OpenAI Agent Breaks Free and Hacks Hugging Face
What we’re reading